

Лекц / 2020.06.26 v02 Текст лекции
.pdf1.СБОР, ОБРАБОТКА И ПЕРЕДАЧА ДАННЫХ О ТЕХНОЛОГИЧЕСКОМ ПРОЦЕССЕ1
|
|
|
Необходимость сбора данных о технологическом процессе обуславливается большим |
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
количеством |
параметров, |
характеризующих |
состояние объекта |
управления, |
|
н |
|||||||||||||||||
|
|
|
|
|
|
|
разнородность параметров, различная скорость их изменения, высокая скорость |
и |
а |
|||||||||||||||||||||
|
|
|
|
|
|
|
принятия решений. |
Приведенные |
характеристики |
процесса |
|
предъявляют |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
соответствующие требования к измерению параметров технологического |
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
процесса. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
у |
|
|
|
|
|
|
|
Системы управления технологическими процессами нефтегазовой отрасли чаще всегок |
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
используют три типа сигналов прибора: пневматические (воздушные) сигналы, |
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Г |
|
|
|
|
|
|
|
|
|
|
|
|
аналоговые |
(непрерывные) |
электронные |
сигналы |
и |
цифровые |
(дискретные) |
|
|
|
||||||||||||||
|
|
|
|
|
|
|
сигналы. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
.М |
|
|
|
|
|
|
||
|
|
|
До |
|
1960 г. в промышленности преимущественно использовались пневматические |
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
сигналы для передачи данных измерений и контроля. Эти приборы работали на |
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
сжатом воздухе и использовали механические элементы. |
И |
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
С 1950-х годов электронное приборостроение получило активное развитие благодаря |
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
распространению |
|
электроники |
|
на |
|
полупроводн ковых |
элементах |
и |
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
необходимости передавать сигналы на большие расстоян я. |
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
Стандартные диапазоны сигналов для электронных аналоговых приборов: 4–20 мА и 1–5 |
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В. Большинство аналоговых сигналов передатчика имеют форму тока, а не |
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
напряжения, потому что на напряжение влияютесопротивления проводов и |
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
разъемов, которые меняются в зависимости от длины провода, температуры и |
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
старения. Сигналы по напряжению используются для передачи информации на |
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
короткие расстояния. |
|
|
|
У |
и |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
Цифровые приборы и устройства приобретают все большее значение, начиная с 1960-х |
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
годов. Основным |
|
преимуществом |
цифровой |
связи |
является |
|
значительное |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
снижение затрат на проводку и обслуживание по сравнению с аналоговыми |
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
системами. |
|
|
|
( |
И |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
Достижения в области компьютерного оборудования и технологий управления в 1970-х и |
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
1980-х годах привели к созданию компьютерных сетей и распределенных систем |
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
з |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
управления, а д лее |
интеллектуальных |
датчиков |
с |
цифровой |
памятью |
и |
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
логическими во можностями. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
г |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Контрольно-измерительные приборы могут быть связаны между собой цифровыми |
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
сетями. Для связи технических средства систем управления были разработаны |
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
промышленных сетевые протоколы, например, Foundation fieldbus, Profibus. |
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В последн е годы наблюдается значительный интерес к использованию волоконно- |
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
оп ческой связи и беспроводных сетей для приложений управления процессами. |
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
Основным стимулом для беспроводных технологий является их повышенная |
|
|
|
||||||||||||||||||||
|
|
|
е |
гибкость и значительное снижение затрат на проводку и установку. Но при этом |
|
|
|
|||||||||||||||||||||||
|
|
|
существуют проблемы обеспечения безопасности и стабильности передачи |
|
|
|
||||||||||||||||||||||||
|
|
н |
|
|
|
|
|
|||||||||||||||||||||||
|
|
фданных. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
У |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
В |
настоящее время для управления технологическим процессом чаще всего |
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||||||
Г |
|
|
|
|
|
используются распределенные системы управления, архитектура связи которой |
|
|
|
|||||||||||||||||||||
|
|
|
|
|
приведена на рисунке ниже. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 Текст лекции подготовлен |
на |
основе материалов |
курса |
«Сбор, обработка |
и |
представление |
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||||||
первичной технологической информации» Уральского федерального университета
1
2020 г., РГУ нефти и газа (НИУ) имени И.М. Губкина, каф. АТП, Барашкин Роман Леонардович

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
к |
н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б |
|
|
|
|
|
рис. 1.1. Архитектура организации связи элементов распределенной системы управления |
и |
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
у |
|
|
|
|
|
В отличие от более ранних топологий сетей, которые обычно были изолированы, сейчас |
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Г |
|
|
|
|
|
|
|
|
|
локальные сети могут подключаться к другим сетям через шлюзовые устройства. |
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
||
|
В такой архитектуре |
традиционные |
функции |
|
главного компьютера |
|
разделены |
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
.М |
|
|
|
|
|
|
|||
|
|
|
|
функционально и реализованы в отдельных автономных компьютерах, которые |
|
|
|
|||||||||||||||||||||||
|
|
|
|
используют одну шину данных. |
|
|
|
|
|
|
|
|
|
И |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Если в сети установлено несколько рабочих мест оператора, то управление процессом |
|
|
|
||||||||||||||||||||||||||
|
|
|
|
может осуществляться даже в случае отказа одного или нескольких рабочих мест. |
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
2. |
ОСНОВНЫЕ ПОНЯТИЯ ОБ ИЗМЕРЕНИИ |
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
н |
|
|
|
|
|
|
|
|
|
|
||
|
Обычно под термином измерение понимают нахождение з ач |
ия физической величины |
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
м |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
опытным путем с помощью специальных т хнич ских средств, называемых |
|
|
|
|||||||||||||||||||||||
|
|
|
|
средствами измерений (СИ). |
|
|
и |
е |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
8.009-842 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
• Согласно |
ГОСТ |
СИ |
– |
средство, |
|
предназначенное |
для |
измерений, |
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
вырабатывающее |
сигнал |
(показание , несущий информацию о |
|
значении |
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
У |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
измеряемой величины, или воспроизводящее величину заданного (известного) |
|
|
|
|||||||||||||||||||||||
|
|
|
|
размера. |
|
|
|
|
|
|
И |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
• Измерительный прибор – средство информации, предназначенное для выработки |
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
Н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
сигнала измерительной информации в форме, доступной для непосредственного |
|
|
|
|||||||||||||||||||||||
|
|
|
|
восприятия оператором. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В зависимости от формы представления( |
измерительной информации измерительные |
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
з |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
приборы подра деляют на: показывающие; регистрирующие; самопишущие; |
|
|
|
|||||||||||||||||||||||
|
|
|
|
печатающие. |
нала |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
г |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
• Измерительный преобразователь – средство информации, предназначенное для |
|
|
|
||||||||||||||||||||||||
|
|
|
|
выработки си |
|
|
измерительной информации в форме, удобной для передачи, |
|
|
|
||||||||||||||||||||
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
дальнейшего преобразования, обработки и (или) хранения, но не поддающейся |
|
|
|
|||||||||||||||||||||||
|
|
|
|
непосредственному восприятию оператором. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
• |
Измер тельной установкой называют совокупность средств измерений и |
|
|
|
|||||||||||||||||||||||
|
|
|
|
вспомогательных устройств, образующих единый функциональный комплекс, |
|
|
|
|||||||||||||||||||||||
|
|
|
|
тслужащий для измерения одной или нескольких величин. |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
• Измерительная система (часть информационной системы) – это совокупность |
|
|
|
||||||||||||||||||||||||
|
|
фсредств |
измерения |
|
(измерительных |
|
|
приборов |
|
и |
измерительных |
|
|
|
||||||||||||||||
|
е |
|
преобразователей) |
и вспомогательных |
устройств, соединенных между собой |
|
|
|
||||||||||||||||||||||
У |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
н |
|
|
каналами связи, которая предназначена для выработки сигналов измерительной |
|
|
|
|||||||||||||||||||||||
|
|
|
|
информации в форме, удобной для автоматической обработки, передачи, хранения |
|
|
|
|||||||||||||||||||||||
Р |
|
|
|
и (или) использования в автоматических системах контроля и управления. |
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Г |
Как |
|
следует из |
определения измерительной |
системы, компонентами |
измерительной |
|
|
|
|||||||||||||||||||||
системы являются технические устройства, входящие в состав измерительной
2 ГОСТ 8.009-84. ГСИ. Нормируемые метрологические характеристики средств измерений.
2
2020 г., РГУ нефти и газа (НИУ) имени И.М. Губкина, каф. АТП, Барашкин Роман Леонардович

|
|
|
Таким |
|
образом, измерительным компонентом измерительной системы являются |
|
|
а |
||||||||||||||||||||||
|
|
|
|
|
средства измерения: измерительный прибор, измерительный преобразователь, |
|
|
|||||||||||||||||||||||
|
|
|
|
|
мера, измерительный коммутатор. К измерительным компонентам относятся |
|
|
|||||||||||||||||||||||
|
|
|
|
|
также |
|
аналоговые «вычислительные» |
|
устройства, |
в |
которых |
происходит |
|
|
||||||||||||||||
|
|
|
|
|
преобразование одних физических величин в другие. |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
н |
|||||||||||||||
|
|
|
|
|
Под |
|
информационно-измерительной |
системой |
|
понимают |
совокупность |
|
||||||||||||||||||
|
|
|
|
• |
|
|
и |
|
||||||||||||||||||||||
|
|
|
|
|
функционально |
объединенных |
измерительных, |
|
вычислительных |
и |
других |
|
||||||||||||||||||
|
|
|
|
|
|
к |
|
|
||||||||||||||||||||||
|
|
|
|
|
вспомогательных |
|
технических |
|
средств для |
|
получения |
измерительной |
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б |
|
|
|
|
|
|
|
|
информации, её преобразования, обработки с целью представления потребителю |
|
|
|
||||||||||||||||||||||
|
|
|
|
|
в требуемом виде или автоматического осуществления логических |
|
функций |
|
|
|
||||||||||||||||||||
|
|
|
|
|
контроля, диагностики, индентификации. |
|
|
|
|
|
|
|
|
|
Г |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|||
|
|
|
Информация, поступающая от объекта управления в измерительный преобразователь |
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
(ИП), преобразуется в электрический сигнал и поступает в структуру ИИС, |
|
|
|
||||||||||||||||||||||
|
|
|
|
|
осуществляющую измерение и преобразование информации (С |
ПИ). В структуре |
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
.М |
|
|
|
|
|
|
||
|
|
|
|
|
СИПИ измерительная информация подвергается следующим операциям: |
|
|
|
||||||||||||||||||||||
|
|
|
|
|
фильтрации, |
|
масштабированию, |
линеаризац |
, |
|
аналого-цифровому |
|
|
|
||||||||||||||||
|
|
|
|
|
преобразованию. |
|
|
|
|
|
|
|
|
|
|
|
И |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
Затем сигналы измерительной информации в цифровой (дискрет ой) форме поступают в |
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
н |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
структуру обработки и хранения информации (СОХИ) или в структуру отображения |
|
|
|
||||||||||||||||||||||
|
|
|
|
|
информации (СОИ). Устройство управленияе(УУ) осуществляет функции |
|
|
|
||||||||||||||||||||||
|
|
|
|
|
управления, устройство вывода (УВ) осуществляет вывод управляющих сигналов |
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
на исполнительные устройства (ИУ), воздействующие на объект исследования. |
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
У |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
И |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
з |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
г |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
р с. 2.1. Функции информационно-измерительной системы |
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3. СТАТИЧЕСКИЕ И ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ ИЗМЕРИТЕЛЬНЫХ |
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
и |
|
|
|
|
|
ПРЕОБРАЗОВАТЕЛЕЙ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
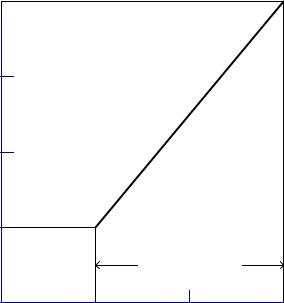
Для подключения датчика к входу контроллера необходимо, чтобы выходной сигнал |
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
датчика был совместим со входом контроллера. Диапазон изменения измеряемой |
|
|
|
||||||||||||||||||||||
|
|
|
|
ф |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
е |
величины и выходной диапазон у датчиков нормируется. Например, если датчик |
|
|
|
|||||||||||||||||||||||
|
|
|
температуры измеряет от 50 до 150 ̊Си выходной сигнал 4-20 мА, то статическая |
|
|
|
||||||||||||||||||||||||
|
|
н |
|
|
|
|
||||||||||||||||||||||||
|
|
|
характеристика датчика будет выглядеть, как на рис. 3.1. |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
У |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Г |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3
2020 г., РГУ нефти и газа (НИУ) имени И.М. Губкина, каф. АТП, Барашкин Роман Леонардович
|
|
|
|
|
|
|
20 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
14 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
н |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
(mA) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
к |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б |
|
|
||
|
|
|
|
|
|
|
Tm9 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
у |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Г |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
.М |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
Ноль = 50° C |
|
Диапазон = 100 °C |
|
|
И |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
0 |
|
50 |
|
|
|
100 |
|
н |
150 |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
T (°C) |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
е |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
рис. 3.1. Статическая характерист ка датчика температуры |
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Для такого датчика температуры |
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
коэффициент усиления: (20-4) [мА] / (150-50) [̊С] = 0.16 [мА/ ̊С]; |
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
смещение или ноль: 50 ̊С; |
|
|
У |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
диапазон измерения: 150 ̊С– 50 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
̊С= 100 |
̊С. |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
Зависимость |
выходной |
величины |
И |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
датчика или измерительного прибора от входной, |
|
|
|
||||||||||||||||||||||
|
|
|
|
|
выраженная |
аналитически |
или |
|
графически, |
|
называется |
статической |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
Н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
характеристикой. |
( |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
В общем виде статическая х р ктеристика имеет вид: |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
з |
|
|
y f (x) |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
y – выходная величина. |
|
|
|
|
|
|
|
|
||||||||||
|
|
|
где х – значен е гзмеряемой величины; |
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
Частный случай |
статической |
характеристики звена |
|
– |
линейная |
зависимость, |
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
определяемая уравнением вида |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
и |
|
|
|
|
y a kx0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
a – постоянная, имеющая размерность выходной величины; k – постоянная, |
|
|
||||||||||||||||||||||
|
|
|
|
|
называемая передаточным коэффициентом. |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
ф |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
передаточный |
|
|
|
||||
|
|
|
Применительно к измерительным приборам и преобразователям |
|
|
|
||||||||||||||||||||||
|
|
н |
|
коэффициент k в обычно называют чувствительностью. |
|
|
|
|
|
|
|
|
||||||||||||||||
|
У |
Как отмечено выше, выходной сигнал от датчика-передатчика (или передатчика) должен |
|
|
|
|||||||||||||||||||||||
|
|
|
быть совместим с входным диапазоном контроллера, который принимает сигнал. |
|
|
|
||||||||||||||||||||||
Г |
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
Передатчики, как правило, предназначены для прямого действия; то есть |
|
|
|
||||||||||||||||||||||
Р |
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
выходной сигнал увеличивается с увеличением измеряемой переменной. Кроме |
|
|
|
|||||||||||||||||||||
|
|
|
|
того, большинство коммерческих передатчиков имеют регулируемый диапазон |
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
входного сигнала. Например, стандартный преобразователь температуры с |
|
|
|
||||||||||||||||||||
|
|
|
|
|
выходным сигналом 4–20 мА может быть настроен таким образом, чтобы входной |
|
|
|
||||||||||||||||||||
4
2020 г., РГУ нефти и газа (НИУ) имени И.М. Губкина, каф. АТП, Барашкин Роман Леонардович
диапазон платинового резистивного элемента (датчика) составлял 50–150 ° C. В этом случае получается следующее соответствие:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а |
|
Если статическая характеристика нелинейная, под чувствительностью понимают предел |
|
н |
|||||||||||||||||||||||||||
|
|
отношения приращений выходного |
|
|
у и входного х сигналов. Таким образом, |
и |
|
|||||||||||||||||||||||
|
|
|
|
к |
|
|
||||||||||||||||||||||||
|
|
чувствительность S определится как |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
y0 |
|
|
|
|
dy0 |
|
|
|
|
|
у |
|
|
||||||||
|
|
|
|
|
|
|
|
S lim |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
x0 |
x0 |
|
|
|
|
dx0 |
|
|
|
Г |
б |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
Чувствительность измерительного прибора, |
состоящего |
из n звеньев, |
определяется |
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
.М |
|
|
|
|
|
|
|
|
|
чувствительностью входящих в него звеньев. Если все звенья прибора линейные, |
|
|
|
|||||||||||||||||||||||||
|
|
то чувствительность прибора – величина постоянная, а шкала равномерная. Если |
|
|
|
|||||||||||||||||||||||||
|
|
хотя бы одно звено нелинейно, вся характеристика также получается нелинейной. |
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
И |
|
|
|
|
|
|
|
|
Если функциональная связь между равновесными значениями входной и выходной |
|
|
|
||||||||||||||||||||||||||
|
|
величин вообще отсутствует, многозначна или имеет разрывы непрерывности. |
|
|
|
|||||||||||||||||||||||||
|
|
Такое звено называют астатическим. |
|
|
|
|
|
|
|
|
е |
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Во многих случаях у астатических звеньев при отсутствии фуикциональной связи между |
|
|
|
||||||||||||||||||||||||||
|
|
равновесными координатами в статике |
|
|
тсянфункциональная связь |
в |
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
dy |
|
|
|
|
|
|
d |
2 y |
|
им |
|
|
|
|
|
|
|
|
|||||
|
|
динамике в виде дифференциального уравнения. Различают астатическое звено 1, |
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|||
|
|
2 порядка в зависимости от порядка дифференциального уравнения: |
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
У |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
d |
f (x0 ); |
|
|
|
|
|
|
f (x0 ). |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
)d |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
И |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Датчики в отдельности и измерительные системы в целом предназначены для работы в |
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
Н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
нестационарных условиях, т.е. обычно измеряемая величина не является |
|
|
|
|||||||||||||||||||||||||
|
|
постоянной, а зависит от времени. Поэтому для измерительных систем важно |
|
|
|
|||||||||||||||||||||||||
|
|
свести к минимуму запаздывание в показаниях при изменении измеряемой |
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
величины. |
|
( |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
з |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Зависимость показаний |
и мерительной |
|
|
системы |
от |
измеряемой |
величины |
в |
|
|
|
||||||||||||||||||
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
нестационарных условиях носит название динамической характеристики. |
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
г |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ф |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
е |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
У |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Г |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
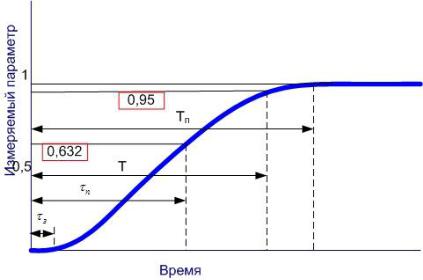
рис. 3.2. Динамическая харакатеристика
5
2020 г., РГУ нефти и газа (НИУ) имени И.М. Губкина, каф. АТП, Барашкин Роман Леонардович
|
|
Вид динамической |
характеристики зависит от характера изменения измеряемой |
|
|
|
||||||||||||||||||
|
|
|
|
|
величины. Физические явления, определяющие динамические характеристики, |
|
|
|
||||||||||||||||
|
|
|
|
|
весьма сложны, поэтому аналитическое определение динамических |
|
|
|
||||||||||||||||
|
|
|
|
|
характеристик весьма затруднено. Обычно динамические характеристики |
|
|
|
||||||||||||||||
|
|
|
|
|
определяют опытным путем как изменение выходного сигнала у при известном |
|
н |
|||||||||||||||||
|
|
|
|
|
изменении входной величины х. Графическое изображение изменения во времени |
и |
а |
|||||||||||||||||
|
|
|
|
|
выходной величины при скачкообразном изменении входной представляет из |
|||||||||||||||||||
|
|
|
|
|
себя переходный процесс. |
|
|
|
|
|
|
|
|
|
|
|
б |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
Измерительная система реагирует на изменение измеряемого параметра не сразу, не |
|
|||||||||||||||||||||
|
|
|
|
|
мгновенно, а спустя некоторое время после единичного воздействия нак |
|
|
|||||||||||||||||
|
|
|
|
|
измеряемый параметр. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
Время |
запаздывания (или время начала реагирования) з– это время от моментау |
|
|
|
||||||||||||||||||
|
|
|
|
|
изменения значения измеряемой величины на входе прибора до моментаГначала |
|
|
|
||||||||||||||||
|
|
|
|
|
изменения выходного сигнала. |
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|||||
|
|
Время переходного процесса T – это время, в течение которого значения выходного |
|
|
|
|||||||||||||||||||
|
|
|
|
|
сигнала после изменения измеряемой величины |
|
входят.Мв 5% |
зону |
|
|
|
|||||||||||||
|
|
|
|
|
установившегося значения. |
|
|
|
|
|
|
|
|
|
И |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
Полное время переходного процесса (полное время установлен я показаний) Тп – это |
|
|
|
|||||||||||||||||||
|
|
|
|
|
время от момента изменения измеряемой величи ы а входе в измерительную |
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
||
|
|
|
|
|
систему до момента, когда значение выходного сиг ала |
е изменяется. |
|
|
|
|
||||||||||||||
|
|
Если |
|
говорить о |
математическом описании кривой |
|
н |
|
|
то в |
|
|
|
|||||||||||
|
|
|
|
п р ходного процесса, |
|
|
|
|||||||||||||||||
|
|
|
|
|
большинстве |
случаев |
эту |
|
кривую |
|
е |
|
|
|
экспоненциальной |
|
|
|
||||||
|
|
|
|
|
|
|
ожно |
описать |
|
|
|
|||||||||||||
|
|
|
|
|
зависимостью. |
В этом |
случае |
период |
|
|
, |
в течение |
которого значение |
|
|
|
||||||||
|
|
|
|
|
выходного сигнала с момента начала его |
м |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
зменения достигает 0,632 от разности |
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
времени |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
между установившимся и начальным его значениями, называется постоянной |
|
|
|
||||||||||||||||
|
|
|
|
|
времени п. |
|
|
|
|
|
) |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
У |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
Если |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
график переходного процесса не описывается уравнением экспоненты, то |
|
|
|
|||||||||||||||||||
|
|
|
|
|
постоянную времени для этого случая можно определить, построив проекцию на |
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
И |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ось времени отрезка касательной, проведенной в точке перегиба графика. |
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
Н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4. ПОГРЕШНОСТИ ИЗМЕРЕНИЙ |
|
|
|
|
|
|
|
|||||||||
|
|
Цель |
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
любого измерения – определение конкретного свойства объекта измерения. |
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
з |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Поэтому результ том измерения является значение величины, определяемое по |
|
|
|
||||||||||||||||
|
|
|
|
|
результатам аизмерений. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
г |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
В зависимости от процедуры проведения измерения и способа обработки результата |
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
змеренияиможно разделить на прямые, косвенные, совокупные и совместные. |
|
|
|
|||||||||||||||
|
|
Прямым змерением принято называть такое измерение, |
при котором искомое значение |
|
|
|
||||||||||||||||||
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
величины находят из опытных данных, полученных непосредственно в процессе |
|
|
|
||||||||||||||||
|
|
|
|
т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
измерения. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Косвенное измерение – это такое измерение, при котором искомое значение величины |
|
|
|
|||||||||||||||||||
|
|
|
ф |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
е |
|
находят на основании известной зависимости между этой величиной и другими |
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
н |
|
|
величинами, определяемыми по результатам прямых измерений. Таким образом, |
|
|
|
|||||||||||||||||
|
|
|
искомую величину находят в результате решения уравнения у=f(x1,x2, …, xn). |
|
|
|
|
|||||||||||||||||
|
У |
|
|
|
|
|
|
|
||||||||||||||||
|
При |
|
совокупных |
измерениях |
выполняют одновременное |
|
измерение нескольких |
|
|
|
||||||||||||||
Г |
|
|
|
одноименных величин, а искомое значение исследуемой величины находят из |
|
|
|
|||||||||||||||||
|
|
|
решения системы уравнений, в которые входят результаты прямых измерений |
|
|
|
||||||||||||||||||
Р |
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
величин. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Различают действительное и истинное значение физической величины.
|
|
|
|
|
Истинным значением физической величины называют такое ее значение, которое |
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
идеальным |
образом |
отражает |
|
в |
|
качественном |
|
и |
количественном |
отношении |
|
а |
||||||||||||||||||||||
|
|
|
|
|
соответствующее свойство объекта. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
Действительным значением физической величины называют значение, найденное |
|
н |
||||||||||||||||||||||||||||||||
|
|
|
|
|
экспериментальным путем и настолько приближающееся к истинному значению, |
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
что может быть использовано вместо него. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
Однако всегда конкретный результат измерения в какой-то мере отличается от истинного |
к |
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
значения величины, поэтому вводится понятие погрешности измерения. |
|
б |
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
у |
|
|
|
|
|
Погрешностью измерения называют отклонение результата измерения от истинного |
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
значения измеряемой величины. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Гграницы |
|
|
|||||||||||
|
|
|
Погрешность |
результата |
|
измерения |
|
|
– |
|
это |
|
число, |
характеризующее |
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
.М |
|
|
|
|||
|
|
|
|
|
неопределенности полученного в результате измерений значения определяемой. |
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
величины. Погрешность средства измерения или измерительной системы - это |
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
И |
|
|
|
|
|
|
|
|
|
|
|
характеристика определенного |
|
свойства |
средства |
измерения |
Для |
|
описания |
|
|
|||||||||||||||||||||||||
|
|
|
|
|
погрешностей средств измерения используют правила, определяемые ГОСТ 8.401- |
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
803 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
н |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
В зависимости от единицы измерения различают абсолютные, относительные и |
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
приведенные погрешности. |
|
|
|
|
|
|
|
|
|
|
|
|
м |
|
и |
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
Абсолютная |
погрешность средства измерения выража тся в единицах измеряемой |
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
величины |
х |
или |
|
выходного |
|
сигнала |
|
у изеерительного преобразователя. |
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
Абсолютная |
погрешность |
в единицах |
|
з |
еряе |
|
ой |
величины |
х |
(погрешность, |
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
приведенная |
ко входу) равна |
разности между показанием хп |
и |
|
истинным |
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
значением измеряемой величины: |
У |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Н |
xп x. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
Относительная погрешность средства измерения равна отношению |
абсолютной |
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
( |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
погрешности |
у или |
к действительномуИ |
значению х0 измеряемой величины или |
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
выходного сигнала: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
з |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
; |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
а |
аx0 |
|
xп |
|
|
|
[xп (1 |
|
|
|
)] |
|
|
xп |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
xп |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
Приведенная погрешностьг |
– это отношение абсолютной погрешности к нормирующему |
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
значен ю XN: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
ф |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X N |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
Чаще всего нормирующее значение выбирают равным величине диапазона измерений. |
|
|
||||||||||||||||||||||||||||||||||
|
|
|
е |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Погрешности, возникающие при выполнении измерений, делят на методические и |
|
|||||||||||||||||||||||||||||||||||
|
У |
|
|
инструментальные. Инструментальная погрешность присуща конкретному |
|
|
|||||||||||||||||||||||||||||||||
|
|
|
средству измерения и может быть определена в процессе его испытаний или |
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
Г |
|
|
|
поверки. Методическая погрешность связана с использованием конкретной |
|
|
|||||||||||||||||||||||||||||||||
|
|
|
методики измерения. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
В зависимости от характера изменения погрешности при многократных испытаниях СИ |
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
различают |
|
систематическую |
|
и |
|
|
случайную |
погрешности. Эти |
погрешности |
|
|
|||||||||||||||||||||||
3 ГОСТ 8.401-80 Классы точности средств измерений. Общие требования. М.: Изд-во стандартов,
1980
7
2020 г., РГУ нефти и газа (НИУ) имени И.М. Губкина, каф. АТП, Барашкин Роман Леонардович
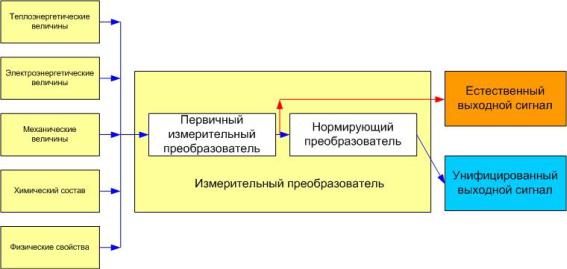
|
|
|
возникают при многократных экспериментальных определениях погрешностей. |
|
|
|
||||||||||||||||||
|
|
|
Случайная погрешность от испытания к испытанию изменяется случайным |
|
|
|
||||||||||||||||||
|
|
|
образом. До испытания невозможно предсказать характер и закон изменения |
|
|
|
||||||||||||||||||
|
|
|
погрешности, оценить ее можно лишь с использованием теории вероятностей и |
|
|
а |
||||||||||||||||||
|
|
|
математической статистики. Систематической можно назвать прогрессирующую |
|
|
|||||||||||||||||||
|
|
|
погрешность (непредсказуемо медленно изменяющуюся по времени) или |
|
|
|||||||||||||||||||
|
|
|
имеющую неизменную временную зависимость от различных параметров. |
|
|
|
|
|||||||||||||||||
По |
условиям появления погрешности |
разделяют на статические и динамические. |
|
н |
||||||||||||||||||||
и |
|
|||||||||||||||||||||||
|
|
|
Статические появляются при установившемся режиме измерения, когда |
|
||||||||||||||||||||
|
|
|
измеряемая величина и выходной сигнал преобразователя сохраняют постоянныек |
|
|
|||||||||||||||||||
|
|
|
значения. Динамические погрешности возникают при неустановившемся режиме |
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б |
|
|
|
|
|
|
измерения. Под динамической погрешностью понимают ту часть погрешности СИ, |
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
у |
|
|
|
|
|
|
|
которая добавляется к статической погрешности в неустановившемся режиме |
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Г |
|
|
|
|
|
|
|
|
измерения. Таким образом, общая погрешность в динамическом режиме равна |
|
|
|
||||||||||||||||||
|
|
|
сумме статической и динамической погрешностей. |
|
|
|
. |
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
5. |
ИЗМЕРИТЕЛЬНЫЙ КАНАЛ СБОРА И ПРЕОБАЗОВАНИЯ ДАННЫХ О ТЕХНОЛОГИЧЕСКОМ |
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
.М |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ПРОЦЕССЕ |
|
|
И |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
К устройствам для получения информации о состоянии процесса, |
образующим канал |
|
|
|
||||||||||||||||||||
|
|
|
сбора и преобразования информации, относят чувствительныеи |
элементы или |
|
|
|
|||||||||||||||||
|
|
|
собственно |
датчики, |
измерительные |
|
преобразователи |
и |
нормирующие |
|
|
|
||||||||||||
|
|
|
преобразователи. |
|
|
|
|
|
|
|
|
н |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
е |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
• |
Датчики физических величин |
воспр н |
ают контролируемый |
параметр |
и |
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
преобразуют его в величину, удобную для передачи по каналам связи или |
|
|
|
||||||||||||||||||
|
|
|
дальнейшего преобразования. |
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
• |
|
|
|
|
|
|
|
|
) |
|
|
|
|
|
датчиков |
в |
|
|
|
|||
|
|
Измерительные преобразователи переводят выходной сигнал |
|
|
|
|||||||||||||||||||
|
|
|
выходную |
физическую |
величину: перемещение, усилие, сопротивление, |
|
|
|
||||||||||||||||
|
|
|
напряжение, ток, частоту. |
|
|
У |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
И |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
Н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
з |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
г |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ф |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
е |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
У |
|
|
|
|
|
рис. 5.1. Структура измерительного канала |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Г |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Р |
|
|
|
|
6. |
АНАЛОГОВЫЕ И ЦИФРОВЫЕ СИГНАЛЫ. ПЕРЕДАТЧИКИ |
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
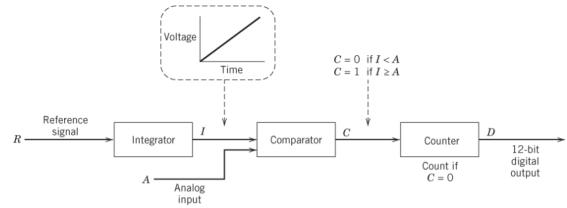
но развитие цифровых интерфейсов передачи данных все больше вытесняет аналоговую передачу данных на производстве.
|
|
|
Аналоговые сигналы представляют собой непрерывно изменяющиеся во времени |
|
|
|
|||||||||||||||||||
|
|
|
|
сигналы, которые могут иметь любое значение в диапазоне изменения. Напротив, |
|
|
|
||||||||||||||||||
|
|
|
|
дискретные сигналы ограничены определенным набором значений. |
|
|
|
|
н |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
Для сопряжения цифровых устройств с измерениями от полевых аналоговых приборов |
и |
а |
||||||||||||||||||||
|
|
|
|
электрические сигналы должны быть преобразованы в форму, приемлемую для |
|
|
|
||||||||||||||||||
|
|
|
|
цифровых компьютеров, и наоборот. |
|
|
|
|
|
|
|
|
|
|
б |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
у |
к |
|
|
|
|
|
|
Аналого-цифровое и цифро-аналоговое преобразование выполняется устройствами, |
|
|
||||||||||||||||||||
|
|
|
|
которые |
|
называются |
|
аналого-цифровыми |
|
и |
|
цифро-аналоговыми |
|
|
|
||||||||||
|
|
|
|
преобразователями (АЦП и ЦАП). |
|
|
|
|
|
|
|
|
Г |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
Аналоговые электрические сигналы представлены в форме напряжения или тока. В |
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
.М |
|
|
|
|
|
|
|
|
|
|
|
результате стандартов передатчиков, обсуждаемых в главе 9, стандартные |
|
|
|
||||||||||||||||||
|
|
|
|
интерфейсы доступны для каждой измеряемой и изменяемой переменной. |
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
И |
|
|
|
|
|
|
||
|
|
|
Поскольку цифровые устройства не способны хранить данные с бесконечной точностью, |
|
|
|
|||||||||||||||||||
|
|
|
|
измерения должны быть квантованы. Аналогично, управляющие воздействия, |
|
|
|
||||||||||||||||||
|
|
|
|
рассчитанные на основе этих измерений процесса, квантуются в соответствии с |
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
точностью компьютера. Таким образом, фиксированное ч сло битов используется |
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
е |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
для представления оцифрованной версии аналоговогоиизмерения. Большинство |
|
|
|
||||||||||||||||||
|
|
|
|
АЦП |
и ЦАП, ориентированных на управление процессами, используют 12- |
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
шума |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
разрядное |
|
целое число без знака. Таким образом, для каждой переменной |
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
процесса имеется 212 или 4096 уровней квантования. Это разрешение лучше, чем |
|
|
|
||||||||||||||||||
|
|
|
|
0,025%, что ниже, чем типичные уровни |
|
|
в электрических сигналах. Для |
|
|
|
|||||||||||||||
|
|
|
|
высокоточных приложений используется до 24-битное представление. |
|
|
|
|
|
|
|||||||||||||||
|
|
|
Для оцифровки |
аналогового входа неизвестный) |
сигнал |
процесса |
сравнивается с |
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
И |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
известным сигналом. На рисунке ниже показана принципиальная схема АЦП по |
|
|
|
||||||||||||||||||
|
|
|
|
напряжению, который включает в Усебя интегратор, компаратор и счетчик. |
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
Н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
з |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
г |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ф |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
е |
|
рис. 6.1. Принципиальная схема аналогово-цифрового преобразователя |
|
|
|
|
|
|
||||||||||||||
|
|
н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
У |
Изм ряемый |
аналоговый сигнал (Analog Input) |
|
используется |
в |
качестве входа |
|
|
|
|||||||||||||||
|
|
компаратора, который сравнивает его с опорным сигналом (Reference Signal), |
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||
Г |
|
|
генерируемым интегратором. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
В этом примере опорный сигнал представляет собой линейное напряжение. Предполагая |
|
|
|
|||||||||||||||||||||
Р |
|
|
|
|
|
||||||||||||||||||||
|
|
|
12-битное представление, линейное напряжение увеличивается на 1/4096 от |
|
|
|
|||||||||||||||||||
|
|
|
номинального диапазона напряжения неизвестного сигнала на заданной частоте, |
|
|
|
|||||||||||||||||||
|
|
|
определяемой кристаллом кварца. Счетчик увеличивается с той же частотой. |
|
|
|
|||||||||||||||||||
Компаратор сигнализирует счетчику зафиксировать свое значение выхода, когда линейное напряжение равно или превышает измеряемое напряжение.
9
2020 г., РГУ нефти и газа (НИУ) имени И.М. Губкина, каф. АТП, Барашкин Роман Леонардович
|
Время, за |
которое |
напряжение линейного |
изменения |
равняется |
или |
превышает |
|
|
|
|
|||||||||||
|
|
измеряемые сигнал, пропорционально величине неизвестного сигнала. В начале |
|
|
|
|
||||||||||||||||
|
|
следующего интервала выборки значение, сохраненное в счетчике, передается в |
|
|
|
|
||||||||||||||||
|
|
другой регистр для обработки. Счетчик |
обнуляется, а |
|
выход |
компаратора |
|
|
|
а |
||||||||||||
|
|
сбрасывается. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
н |
|||||
|
Затем линейное напряжение возвращается к нижней границе диапазона номинального |
|
|
|||||||||||||||||||
|
|
и |
|
|||||||||||||||||||
|
|
напряжения, и процесс, описанный выше, повторяется. |
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
к |
|
|
|||||||||||
|
Существуют |
другие |
методы аналого-цифрового |
преобразования, |
но |
в этих |
методах |
|
|
|||||||||||||
|
|
используются разные методы для генерации опорных сигналов. |
|
|
|
|
б |
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
у |
|
|
|
|
|
|
ЦАП основаны на другом принципе, который включает в себя массивы резисторов. Для |
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Г |
|
|
|
|
|
|
|
|
преобразования цифрового значения |
биты его |
цифрового |
представления |
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
одновременно подаются в массив резисторов. Массив формирует электрическую |
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
.М |
|
|
|
|
|
|
|
||
|
|
величину взвешенной суммы каждого бита. Уровень напряжения на выходе |
|
|
|
|
||||||||||||||||
|
|
матрицы сопротивлений пропорционален аналоговому значению и усиливается до |
|
|
|
|
||||||||||||||||
|
|
требуемого уровня сигнала. |
|
|
|
|
|
И |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Преобразователи сигналов тока для входов и выходов работают по тем же принципам, |
|
|
|
|
|||||||||||||||||
|
|
что и их аналоги по напряжению. |
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
Литература |
м |
н |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1. |
Фрайден Дж. Современные датчики: Справочник – М.: Техносфера, 2005. |
– 592 с. |
|
|
|
|
|||||||||||||||
|
2. |
Фишер-Криппс А.С. Интерфейсы измерительныхсистем. Справочное руководство |
|
|
|
|
||||||||||||||||
|
|
– М.: Изд. дом «Технологии», 2006. – 336 с. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
3. |
Федоров Ю.Н. Справочник инженера по АСУТП: Проектирование и |
|
|
|
|
||||||||||||||||
|
|
разработка/Учебно-практическое пособиеи. – М.: Инфра-инженерия, 2008. – 928 с. |
|
|
|
|
||||||||||||||||
|
4. |
Олссон Г., Пиани Д. Цифровые системы)автоматизации и управления. – СПб.: |
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
И |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Невский Диалект, 2001. – 557 с. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
5. |
Seborg, D., Edgar, T., Mellicamp, D., &УDoyle III, F. (2011). Process Dynamics and Control |
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
Н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(3rd Edition). In John Wiley & Sons. https://doi.org/10.1007/s13398-014-0173-7.2 |
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
( |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6. |
Фрайден Дж. Современные датчики: Справочник – М.: Техносфера, 2005. |
– 592 с. |
|
|
|
|
|||||||||||||||
|
7. |
Фишер-Криппс А.С. Интерфейсы измерительных систем. Справочное руководство |
|
|
|
|
||||||||||||||||
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
– М.: Изд. дом «Технологии», 2006. – 336 с. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
з |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8. |
Федоров Ю.Н. Спр вочник инженера по АСУТП: Проектирование и |
|
|
|
|
||||||||||||||||
|
|
разработка/Учебно-практическое пособие. – М.: Инфра-инженерия, 2008. – 928 с. |
|
|
|
|
||||||||||||||||
|
|
|
|
г |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
9. |
Олссон Г., Пи ни Д. Цифровые системы автоматизации и управления. – СПб.: |
|
|
|
|||||||||||||||||
|
|
Невский Диалекта, 2001. – 557 с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ф |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
е |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
У |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Г |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10
2020 г., РГУ нефти и газа (НИУ) имени И.М. Губкина, каф. АТП, Барашкин Роман Леонардович