

Лекция 13 - Решения для подвижных объектов
.pdfРешения для подвижных
объектов

Концепция сетей VANET
•Vehicular ad hoc networks (VANET) – сети для организации дороги как инфокоммуникационной системы (ITS).
•Организуют связи автомодиль-автомобиль (V2V) и автомобильобъекты дороги (V2Х).
Концепция V2X
Концепция V2X охватывает несколько подкатегорий приложений:
•Vehicle-to-Infrastructure (V2I – транспортное средство-инфраструктура)
•Vehicle-to-Pedestrian (V2P – транспортное средство-пешеход)
•Vehicle-to-Network (V2N – транспортное средство-сеть)
•Vehicle-to-Vehicle (V2V –транспортное средство-транспортное средство).
Для реализации предлагается два подхода:
1.DSRC (Dedicated Short Range CommunicationIEEE 1609.4) - IEEE 802.11p, 802.11bd (в разработке)
2.Cellular-V2X (С-V2X) - использующий LTE и 5G
Используемые частотные диапазоны: 5,85–5,925 GHz – США (Район 2), 5 875-5 905 MHz – Европа (Район 1)
Cравнение технологий для обеспечения работы систем V2V/V2X
Параметр/Технология |
DSRC |
LTE-V2X |
NR-V2X |
|
Поддержка прямых |
|
|
|
|
коммуникаций с низкой |
+ |
+ |
+ |
|
задержкой |
|
|
|
|
Работа в диапазоне 5.9 ГГц |
+ |
+ |
+ |
|
|
||||
|
|
|
|
|
Полоса пропускания канала |
10/20 МГц |
10/20 МГц |
10/20/N x МГц |
|
связи |
||||
|
|
|
||
Поддержка модуляции |
до 64-КАМ |
до 64-КАМ |
до 64-КАМ |
|
Скорость передачи данных |
25 Мбит/с |
20-25 Мбит/с |
30-50 Мбит/с |
|
|
|
|
|
|
|
|
|
<10мс (до 320м) |
|
Средние задержки |
<100мс |
<50-100мс |
10-100мс (320- |
|
2000м) |
||||
|
|
|
||
|
|
|
|
|
Дальность действия |
<1000м |
<1000м |
<2000м |
|
Отношение сигнал помеха при |
>6,5дБ |
>4дБ |
>-5дБ |
|
скорости 250 км/ч |
||||
|
|
|
||
Дуплексный метод |
TDD |
TDD/FDD |
TDD/FDD |
Требования МСЭ к параметрам беспроводных технологий для обеспечения работы систем V2V/V2X
Параметр |
|
3GPP |
|
IEEE |
|
|
|
|
|
Рабочий диапазон частот |
5 |
855–5 925 МГц |
5 |
850–5 925 МГц |
|
|
|
|
|
Ширина полосы канала связи |
10 |
МГц или 20 МГц |
10 |
МГц или 20 МГц |
|
|
|
|
|
РЧ-мощность передачи |
|
23-33 дБм |
|
|
|
|
|
|
|
Схема модуляции |
BPSK OFDM, QPSK OFDM, 16QAM OFDM, |
BPSK OFDM, QPSK OFDM, 16-КАМ OFDM, |
|
64QAM OFDM (NR) |
64-КАМ OFDM |
||
|
|||
|
|
|
|
Упреждающая коррекция |
Сверточное кодирование, скорость = |
Сверточное кодирование, скорость = |
|
ошибок |
1/2, 3/4, 2/3 |
1/2, 3/4 |
|
|
3; 4,5; 6; 9; 12; 18; 24 Мбит/с для полосы |
3; 4,5; 6; 9; 12; 18; 24 и 27 Мбит/с для |
|
Скорость передачи данных |
10 МГц LTE |
||
полосы 10 МГц |
|||
|
До 24-27 Мбит/с для полосы 10 МГц NR |
||
|
|
||
|
|
|
|
Дуплексный метод |
TDD |
TDD |
•Рекомендация МСЭ-R M.2084-1(11/2019) Стандарты радиоинтерфейсов для двусторонней связи между транспортными средствами и между транспортными средствами и инфраструктурой для применений интеллектуальных транспортных систем.
•3GPP, релизы 14-16
Примеры услуг:
•Предотвращение столкновений включает помощь при повороте влево / вправо, помощь при движении по перекрестку, предупреждение об очереди и аварийные электронные стопсигналы. Все они предназначены для того, чтобы водители могли избежать столкновения с другими автомобилями. Это самая распространенная категория, которую планировалось осуществить в рамках данной системы.
•Ситуационная осведомленность в реальном времени относится к транспортному средству, получающему информацию о закрытии полосы движения, дорожном движении, дорожных работах и других условиях, которые могут повлиять на водителя.
•Уязвимый участник дорожного движения – это категория технологий, которые позволяют пешеходам, велосипедистам и транспортным средствам взаимодействовать.
•Мониторинг автомобиля позволяет осуществлять дистанционный мониторинг состояния автомобиля.
•Сквозной просмотр позволяет транспортным средствам обмениваться изображениями с камеры на дороге (впереди идущие автомобили транслируют изображения для тех, кто находится позади).
•Совместное использование датчиков обеспечивает возможность обмена данными датчиков HD для лучшей координации с другими транспортными средствами.
•Автономные транспортные средства включают поддержку, интеграцию с системами ADAS, автоматическим запуском транспортного средства на светофорах.
•Аварийное предупреждение транспортного средства предупреждает водителя о приближении аварийного транспортного средства.
•Приложения для управления трафиком.
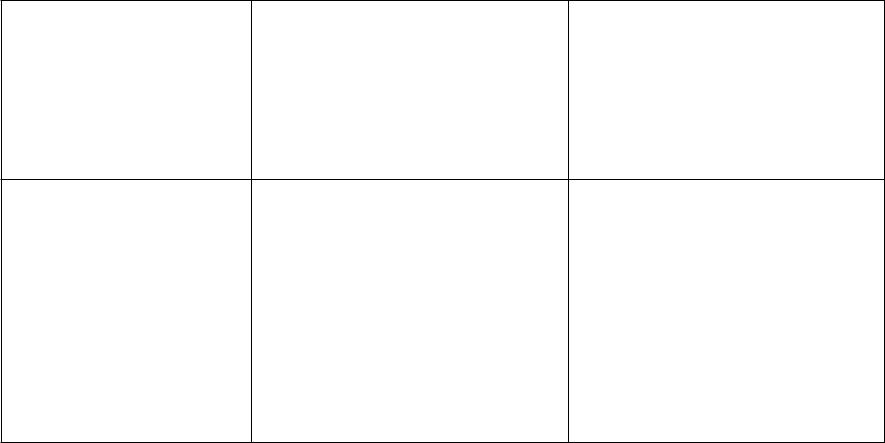
LOS, сельская местность
Сценарии связи
NLOS, городской перекресток
LOS, встречные ТС в городе
NLOS, Автомагистраль
LOS, Автомагистраль
Сценарии использования
1.Vehicles Platooning (Караван Транспортных Средств) позволяет транспортным средствам динамически формировать караван, путешествующий вместе.
2.Extended Sensors (Расширенные Датчики) позволяют обмениваться необработанными или обработанными данными, собранными с помощью локальных датчиков или видеоизображений в реальном времени, между транспортными средствами, подразделениями на дорогах, устройствами пешеходов и серверами приложений V2X.
3.Advanced Driving (Продвинутое Вождение) обеспечивает полуавтоматическое или полностью автоматизированное вождение.
4.Remote Driving (Дистанционное Вождение) позволяет удаленному водителю или приложению V2X управлять удаленным транспортным средством
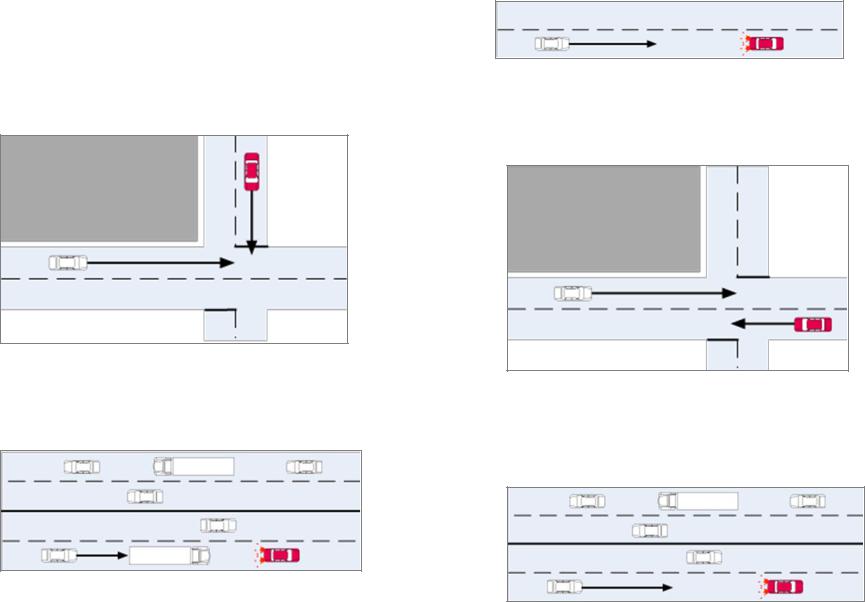
Основные компоненты реализации системы V2X в транспортном средстве
•Закодированные сообщения, полученные или отправленные через интерфейс V2X, кодируются/декодируются модулем аппаратной безопасности (HSM).
•Блок строится на основе многоядерной системы на кристалле (SoC) для стека V2X.
•Содержит приемопередатчик и систему GNSS для синхронизации времени.
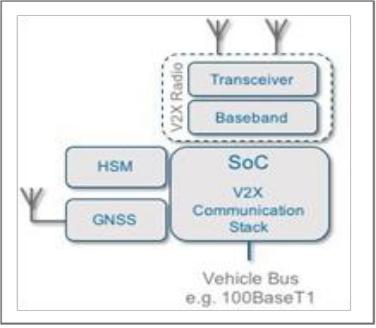
Типичное расположение антенн на легковом автомобиле (а) и распределение электромагнитного поля при разном расположении антенн (б)
• Использование двух антенн обеспечивает лучшую диаграмму направленности в горизонтальной плоскости.
• Так как система V2X предназначена для повышения безопасности движения, то необходимо обеспечить возможность передачи и приема сигналов в любом направлении с высокой эффективностью.
• Области покрытия диаграммой направленности в передней и задней области не должны иметь мертвых зон.